


Avèk devlopman rapid nan endistri lojistik modèn la, depo ki genyen twa dimansyon machin navèt kat-fason an te vin youn nan fòm endikap nan depo otomatik ki genyen twa dimansyon akòz avantaj li yo nan fonksyon depo efikas ak dans, depans fonksyònman, ak entèlijan sistematik. jesyon nan sistèm nan depo.

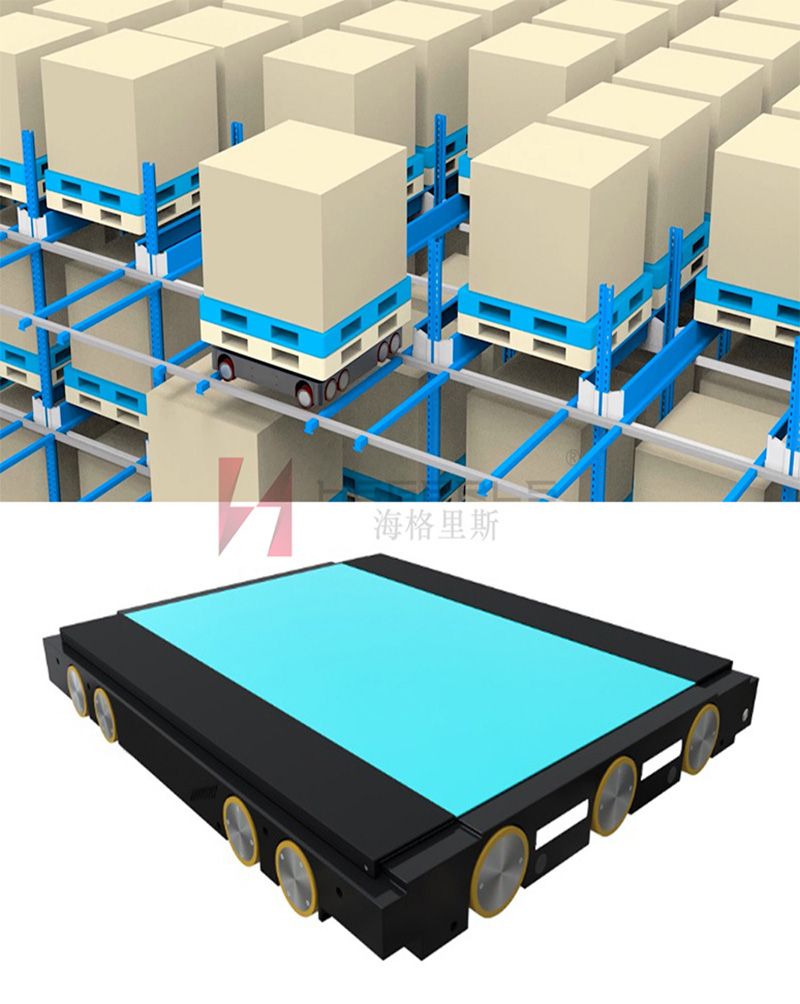
Depo ki genyen twa dimansyon machin navèt kat-fason se yon kalite depo otomatik ki genyen twa dimansyon, ki gen ladann yon machin navèt kat-fason, etajè ki genyen twa dimansyon, asansè, liy transporteur plato, leve ak transfere machin, ak yon sistèm kontwòl lojisyèl. . Seksyon etajè a itilize pou estoke machandiz, navèt kat-fason yo itilize pou transpòte machandiz sou etajè a, epi sistèm kontwòl lojisyèl an itilize pou kontwole operasyon kat-fason navèt la ak lòt ekipman automatisation, epi anrejistre sitiyasyon aktyèl la. nan machandiz yo. Kat-fason navèt machin ki genyen twa dimansyon depo a se yon solisyon depo komen otomatik ki genyen twa dimansyon ki ka aplike nan iregilye, iregilye, gwo rapò aspè oswa ti varyete gwo pakèt, milti varyete gwo pakèt depo. Lè w itilize mouvman an vètikal ak orizontal nan machin navèt kat-fason ak kolabore ak asansè a pou operasyon chanje kouch, yo ka reyalize depo otomatik ak rekipere machandiz yo, ki apwopriye pou koule ki ba ak depo dansite segondè kòm byen ke gwo koule ak depo dansite segondè. Sistèm depo kat-fason ki genyen twa dimansyon navèt la se yon nouvo kalite sistèm depo entèlijan ki entegre plizyè fonksyon tankou anpile otomatik, manyen otomatik, ak gid san ekipe. Avèk devlopman rapid nan lojistik depo ak endistri e-commerce, li te lajman aplike.

Depo ki genyen twa dimansyon nan machin navèt kat-fason se pi konplèks nan orè kontwòl, jesyon lòd, algoritm optimize wout, ak lòt aspè, ki fè aplikasyon pwojè pi difisil. Se poutèt sa, gen relativman kèk founisè, ak Hebei Woke Metal Products Co, Ltd (pwòp tèt ou posede mak: HEGERLS) se youn nan founisè yo kèk.
Konpare ak depo manyèl depo etajè ak chajman, solisyon navèt kat-fason an te evolye sistèm plat "machandiz pou moun" nan yon sistèm milti-kouch 3D "machandiz pou moun", kreye yon depo otomatik ki genyen twa dimansyon ak depo ki pi wo ak pi dans. espas yo. Solisyon depo ki genyen twa dimansyon navèt kat-fason HEGERLS apwopriye pou depo espesifikasyon machin yo tankou palèt, posode, ak bwat katon, epi li apwopriye pou divès kalite konplèks espasyal ak senaryo endistri. Nan menm sistèm nan Layout espasyal, HEGERLS kat-fason navèt machin nan twa dimansyon sistèm depo a gen yon pi wo degre nan automatisation ak pi fò kapasite antre ak sortant pwosesis konpare ak sistèm depo tradisyonèl yo, ki ka anpil diminye tan pwosesis travay.
Pwosesis operasyon HEGERLS kat-fason navèt machin twa dimansyon depo
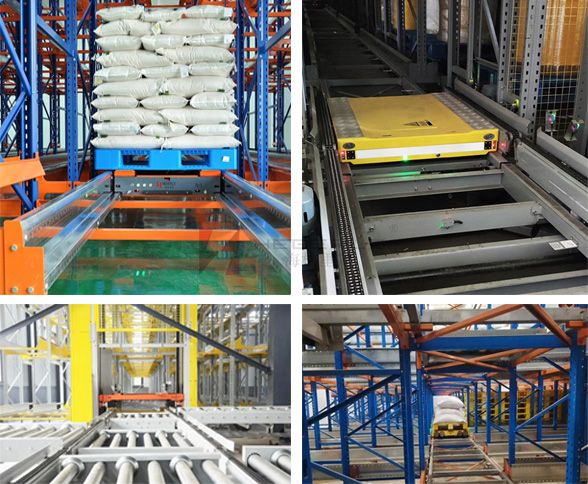
1) Depo: Se plato a depo dirèkteman mete nan pò a depo atravè yon chariot, epi apre yo fin peze bouton an depo, liy transporteur a deplase nan yon direksyon ki nan depo. Apre enspeksyon aparans, enspekte si byen yo mete byen. Si yo kalifye, yo pral estoke ak analize ak kòd bar; Si li pa kalifye, li pral retounen nan depo a epi machandiz yo pral manyèlman rearanje. Scanner kòd bar la analize kòd palèt la. Apre yon optik siksè, WCS (sistèm kontwòl) bay valè kòd bar WMS. WMS (sistèm enfòmasyon jesyon òdinatè) bay kote kago a baze sou valè kòd bar la epi voye li bay WCS (ki gen ladan enfòmasyon tankou kantite kouch, ranje, kolòn, ak pwofondè kote kago a); WCS voye enfòmasyon sou kote kago yo resevwa bay PLC a; PLC a kontwole operasyon liy transporteur a lè li jwenn adrès destinasyon pou depo; Ansanm kontwole anvwaye a pou transpòte machandiz nan kouch destinasyon an. Si eskanè a echwe eskane kòd la, WCS ap bay WMS fidbak sou rezilta echèk eskanè a, ak liy transporteur a ap sispann kouri epi tann pou pwosesis manyèl; Si valè eskanè a detèmine pa WMS yo pa valab, liy transporteur a ap sispann kouri epi tann pou pwosesis manyèl; Operatè yo ka sèvi ak tèminal pòtatif pou eskane kòd ankò oswa ranplase enfòmasyon kòd bar pou jere sitiyasyon eskanè nòmal. Si machandiz yo bezwen retounen pou trete, peze "bouton retounen" nan pò depo a, epi machandiz yo pral retounen nan pò depo a pou trete.
2) Sispann tann machandiz yo deplase nan liy transporteur nan papòt asansè a; PLC a konfime kantite kouch etajè ke machandiz yo bezwen rive dapre adrès destinasyon an pou depo, epi li rele asansè a. Lè asansè a rive nan premye etaj la, liy transporteur a transpòte machandiz nan asansè a, ak machandiz yo pase nan asansè a pou rive nan etaj destinasyon an; Apre asansè a rive nan kouch destinasyon an, machandiz yo soti nan asansè a ansanm ak liy transporteur asansè a epi tann kamyon navèt la pran machandiz yo nan pò pick-up la.
3) WMS (sistèm enfòmasyon jesyon òdinatè) voye travay entrant sou yon baz regilye, ak WCS (sistèm kontwòl) resevwa travay yo entrant epi bay yo nan veyikil navèt destinasyon machandiz yo; Navèt la resevwa enstriksyon entrant yo, kondwi nan pò pickup nivo destinasyon an pou ranmase machandiz yo, epi transpòte yo nan kote kago destinasyon an. WMS (Sistèm Enfòmasyon sou Jesyon Òdinatè) bay yon travay nan yon moman, ak WCS (Sistèm Kontwòl) egzekite travay antre ak sortant ki baze sou lòd travay WMS (Sistèm Enfòmasyon sou Jesyon Òdinatè). Anvan WMS (Sistèm Enfòmasyon sou Jesyon Òdinatè) bay travay entrant, li nesesè pou detèmine si travay sortant la te konplete; Apre fini an nan travay la sortan, travay la antre yo bay yo anpeche enpas ki te koze pa okipasyon an nan resous liy CONVEYOR.
4) Sortant: WMS (Computer Management Information System) bay travay sortant (ki gen ladan adrès kòmanse ak adrès destinasyon) WCS (sistèm kontwòl). Apre WCS (sistèm kontwòl) resevwa travay la soti, machandiz yo soti yo transpòte pa machin nan navèt sou nivo aktyèl la nan machandiz yo nan liy lan CONVEYOR asansè; Machandiz yo sispann tann sou liy transporteur a nan antre asansè a, pandan y ap PLC a kontwole asansè a pou rive nan nivo aktyèl la nan machandiz yo; Apre asansè a rive nan nivo aktyèl la nan machandiz yo, liy transporteur a transpòte machandiz yo nan asansè a. Asansè a pote machandiz yo nan premye nivo, ak machandiz yo sòti asansè a. Liy transporteur a transpòte machandiz yo nan pò a sòti. Manyèlman retire plato a epi konplete pwosesis sortant la.
5) Sistèm WMS a bay kote pou antre, sòti, ak transfè (deplase soti, deplase nan depo), epi sistèm kontwòl depo a pa sipòte plase kote yo; Si gen yon plato ki bloke veyikil navèt entèlijan an pandan wout vwayaj li a, WMS bezwen premye bay yon travay transfè depo epi retire plato bloke a anvan li bay travay ki vin apre yo.
6) Sistèm kontwòl otomatik (WCS) egzekite travay yo nan lòd yo resevwa tan yo, ak travay yo resevwa an premye yo te egzekite an premye.
7) WMS (Computer Management Information System) bay travay sou yon baz regilye, epi apre yo fin bay yo priyorite anndan, WCS bay yon sèl travay chak fwa.
8) Efikasite nan ekzekisyon nan ekipman automatisation se pre relasyon ak lòd nan ki machandiz yo estoke ak mete, osi byen ke metòd la kite depo a ak pwofondè nan tinèl la. Metòd sa yo detèmine efikasite aktyèl la nan ekipman final la automatisation. Se efikasite nan ekipman automatisation ki baze sou efikasite nan jwenn anba site la nan opere nan senaryo ki anwo a.
9) Si yon machin navèt sou yon kouch sèten fonksyone byen, apre yo fin konfime enfòmasyon sou fay la manyèlman, yo ka deplase machin ki gen defo a nan yon kote ki pa afekte chemen antre ak sortant yo. Machin san fè anyen konsa sou lòt kouch yo ka leve epi ranplase nan kouch machin ki defo pou fè travay yo.
Hebei Woke, kòm yon manifakti byen li te ye ak patant teknoloji ekipman ki enpòtan, te envesti yon gwo kantite lajan nan rechèch ak devlopman ak amelyore teknoloji ekipman entèlijan ki gen rapò chak ane. Faktori pwòp mak li HEGERLS gen liy pwodiksyon otomatik ak jesyon entèlijan, e kounye a, li ale mondyal. Li te fè konfyans pa anpil kliyan nan peyi ak rejyon tankou Ewòp, Amerik, Mwayen Oryan, Amerik Latin, ak Azi Sidès, e li te endepandamman fèt ak pwodui machin navèt entèlijan Machin navèt multikouch, machin navèt paran-pitit, kat-fason. machin navèt, ak anpileur tinèl yo te vin deziyen otomatik ki genyen twa dimansyon mak ekipman depo pou anpil antrepriz.
Lè poste: Me-15-2023