



Avèk devlopman akselere ak iterasyon kontinyèl nan endistri a depo ak lojistik, pi plis ak plis demann pou sibdivizyon parèt, ak pi wo kondisyon pou efikasite nan depo robo yo te tou mete pi devan. Se konsa, HEGERLS te kontinyèlman inovasyon pwodwi ak aplikasyon pou depo selon demann mache soti nan "etajè a moun" konplo davwa nan "kontenè a moun" ekipman robo depo, etajè robo depo, solisyon depo robo depo, elatriye nan robo bin.
Nan dènye ane yo, Hebei Walker Metal Products Co, Ltd (prensipal mak: HEGERLS) ak Hairou Innovation Co, Ltd te negosye yon seri de koperasyon sou pwodwi nan travay biznis, angaje nan bay depo efikas, entelijan, fleksib ak Customized. solisyon automatisation atravè teknoloji robo ak algoritm entèlijans atifisyèl, ak kreye valè pou chak faktori ak depo lojistik. Lè yo konsantre sou R&D ak konsepsyon sistèm robo depo bwat la, pwoteksyon endepandan R&D nan eleman debaz yo tankou kò robo, algorithm pwezante ki kache, sistèm kontwòl, orè robo, ak sistèm jesyon depo entèlijan yo te reyalize, ak layout patant nan kay ak aletranje te pote soti.
HAIPICK te amelyore nan katriyèm jenerasyon an. Li se premye kalite bwat depo robo sistèm devlope epi mete nan itilizasyon komèsyal yo. Li ka ede depo a fè jesyon otomatik, reyalize manyen entèlijan, davwa ak klasman, ak aksepte kondisyon Customized. Kounye a, li te aplike nan 500 + pwojè nan kay ak aletranje, lajman ki itilize nan soulye, 3PL, e-commerce, pouvwa, 3C manifakti, medikaman, Yo Vann an Detay ak lòt endistri, ak senaryo miltip. Avèk sistèm Kubao, kliyan yo ka reyalize transfòmasyon automatisation depo nan yon semèn, ogmante dansite depo pa 80% - 400%, ak amelyore efikasite travay travayè yo pa 3-4 fwa.

Dènyèman, solisyon robo entèlijan HAIPICK nan robo Kubao pibliye pa HEGERLS te reyalize yon konbinezon pi bon nan "depo entansif + machandiz pou moun davwa" atravè konbinezon efikas, segondè depo ak gwo estabilite robo entèlijan bin ak ti, lejè, efikas, fleksib. ak pri-efikas entèlijan machin manyen robo, Li efektivman rezoud pwen an doulè nan efikasite operasyon manyèl ki ba nan "davwa ak klasman ak masiv SKU retounen" anba kondisyon an nan "ultra-wo koule entrant ak sortant". Inovasyon, pratik ak reprezantativite solisyon sa a yo te rekonèt ak favorize inanimman pa kliyan aplikasyon yo.
Kounye a, robo entèlijan HAIPICK nan robo Kubao pibliye pa HEGERLS gen ladan: robo davwa katon HEGERLS A42N, robo davwa leve HEGERLS A3, doub robo pwofondè HEGERLS A42D, robo télescopique leve HEGERLS A42T, lazè SLAM milti-kouch robo HEGERLS A42M SLAM , milti-kouch bin robot HEGERLS A42, dinamik lajè ajiste bin robo HEGERLS A42-FW, elatriye.

Konsèp konsepsyon HEGERLS bin robo:
Atravè mòd konbinezon "bin robot + yon sèl kouch kachèt + machin manyen robo (savwa," pote Trolley "), pwen yo doulè efikasite travay ki ba nan senaryo biznis tankou" 3000-10000 bin / èdtan kapasite pwosesis "tankou klasman yo. efektivman rezoud. Lide prensipal solisyon robot HEGERLS se divize travay la epi fè pi bon itilizasyon tout bagay, sètadi:
» Sèvi ak robo bin ki koute chè pou konsantre sou "konstriksyon";
» Konsantre sou "brik k ap deplase" ak robo manyen pri ultra-ba;
» Pote kliyan pi gwo pwodiksyon ak pi efikas solisyon depo ak pi ba pri.

5 en nan robo bin HEGERLS:
1) Robo machin nan manyen machin gen yon konsepsyon kontra enfòmèl ant, estrikti senp ak serye, pi piti espas chanèl, ak orè sistèm pi fleksib; Pri a se pi ba, ki se sèlman apeprè 20% nan pri a nan robo bin konvansyonèl yo.
2) Robo machin nan manyen machin gen kapasite nan k ap grenpe, ka pote bwat la materyèl pou monte nan estasyon travay la, ak wotè a davwa se apeprè 800mm (wotè a ka ajiste fleksib pou adapte yo ak operasyon an davwa). Li ka chwazi machandiz nan yon pozisyon fiks ki konfòm ak wotè ergonomic, ak operasyon an se senp, efikas ak pratik.
3) Robot bin la responsab pou "monte ak desann davwa ak mete" nan direksyon vètikal la, ak Trolley transpò a responsab pou "transpò long distans nan bin" nan direksyon orizontal. Robo bin la ak chariot pote a yo lage youn ak lòt nan pozisyon tanpon an. De robo yo pa afekte youn ak lòt epi maksimize efikasite itilizasyon an.
4) Nan zòn nan depo entansif etajè segondè, premye etaj la nan espas depo a transfòme nan mwatye nan espas tanpon ak mwatye nan kanal la. Machin vid la ka pase anba espas tanpon ak machin chaje a ka pase nan kanal la.
5) Robo Hopper la adopte mòd "yon sèl grip", anile mekanis wotasyon an, epi li adopte chasi inivèsèl robo twazyèm jenerasyon poukont li devlope pa HEGERLS. Estrikti an jeneral trè senp, pri a se sèlman apeprè 60% nan robo Hopper konvansyonèl la, men efikasite machin sèl la amelyore pa 100%.

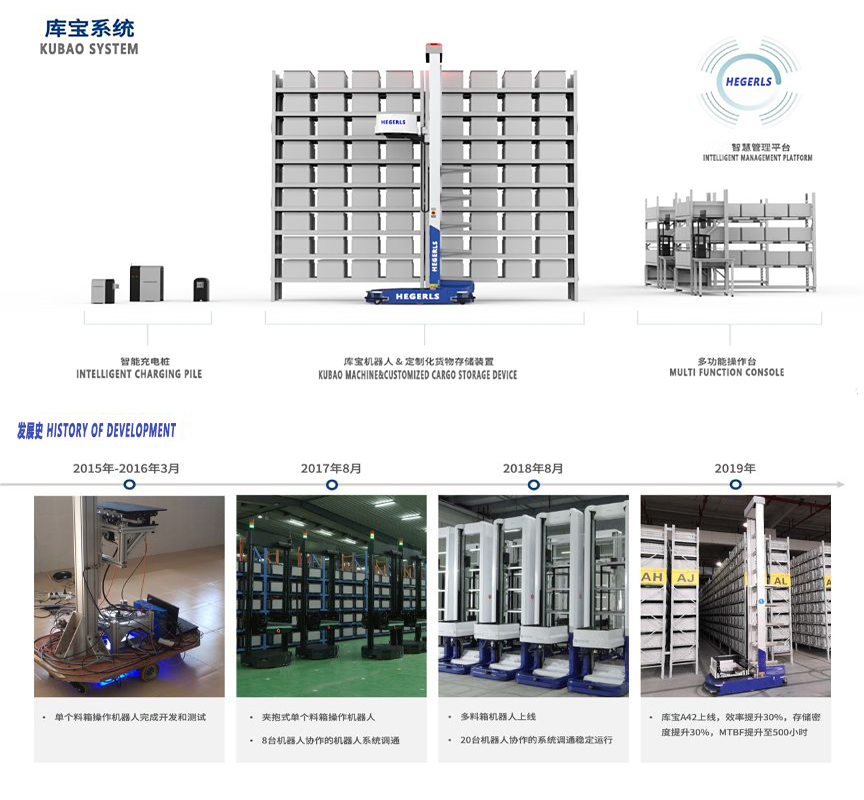
Anplis de sa nan robo depo bin, davwa estasyon travay, elatriye, HEGERLS ka bay kliyan ak yon seri konplè nan sistèm jesyon depo - platfòm jesyon entèlijan, ki gen ladan IWMS sistèm jesyon depo entelijan, ESS ekipman orè sistèm jesyon, RCS sistèm kontwòl robo, ki ka koòdone ak MES kliyan yo, ERP ak lòt sistèm lojisyèl, epi li ka koòdone ak robo Kubao, bra mekanik endistriyèl, charyo san ekipe ak lòt ekipman automatisation, Fòm yon seri konplè nan sistèm robo Kubao.
Tan pòs: Nov-01-2022