



Otomatik depo ki genyen twa dimansyon se yon pati enpòtan nan lojistik. Li gen anpil avantaj tankou ekonomize tè, diminye entansite travay, elimine erè, amelyore nivo automatisation depo ak jesyon, amelyore kalite jesyon ak operatè yo, diminye pèt depo ak transpò, efektivman diminye rès travay kapital la, ak amelyore lojistik. efikasite, An menm tan an, otomatik ki genyen twa dimansyon depo ki konekte ak sistèm enfòmasyon jesyon òdinatè nivo faktori a ak konekte ak liy pwodiksyon an se yon lyen kle esansyèl nan CIMS (Computer Integrated Manufacturing System) ak FMS (sistèm fabrikasyon fleksib). Li se tou yon sistèm ki otomatikman magazen ak pran soti lojistik san entèvansyon manyèl dirèk. Li se yon pwodwi gwo teknoloji nan devlopman nan sosyete modèn endistriyèl, e li enpòtan pou antrepriz amelyore pwodiktivite Rediksyon pri jwe yon wòl enpòtan.
Nan dènye ane yo, ak amelyorasyon kontinyèl nan pwodiksyon antrepriz ak jesyon, pi plis ak plis antrepriz reyalize ke amelyorasyon nan ak rationalité nan sistèm lojistik trè enpòtan nan devlopman nan antrepriz. Anpileur a se ekipman ki pi enpòtan pou leve ak anpile nan depo otomatik ki genyen twa dimansyon. Li ka transpòte machandiz soti nan yon kote nan yon lòt atravè operasyon manyèl, operasyon semi-otomatik oswa operasyon plen-otomatik. Li ka navèt retounen ak lide nan liy otomatik ki genyen twa dimansyon epi estoke machandiz yo nan antre liy lan nan lòj la kago; Oswa okontrè, pran machandiz yo nan lòj la kago epi transpòte yo nan travèse liy lan, se sa ki, anpileur a se yon tren oswa chariot trackless ekipe ak ekipman leve. Anpileur a ekipe ak yon motè pou kondwi anpileur a pou avanse pou pi ak leve palèt la. Yon fwa anpileur la jwenn espas kago ki nesesè yo, li ka otomatikman pouse oswa rale pati yo oswa bwat kago yo nan oswa soti nan etajè a. Stacker la gen yon Capteur pou detekte mouvman orizontal la oswa wotè leve pou idantifye pozisyon ak wotè espas kago a, Pafwa ou ka li tou non pati ki nan veso a ak lòt enfòmasyon ki enpòtan sou pati.
Ak devlopman nan teknoloji kontwòl òdinatè ak otomatik depo ki genyen twa dimansyon, aplikasyon an nan anpileur se pi plis ak plis vaste, pèfòmans nan teknik se pi bon ak pi bon, ak wotè a ap ogmante tou. Se konsa, lwen, wotè nan anpileur ka rive nan 40m. An reyalite, si li pa restriksyon nan konstriksyon an depo ak pri, wotè nan anpileur ka san restriksyon. Vitès fonksyònman anpileur a tou toujou ap amelyore. Kounye a, vitès fonksyònman orizontal anpileur a se jiska 200m / min (anpileur a ak ti chaj te rive nan 300m / min), vitès la leve se jiska 120m / min, ak vitès la teleskopik nan fouchèt la se jiska 50m. / min.
Konpozisyon anpileur
Anpileur a konpoze de yon ankadreman (anwo gwo bout bwa, pi ba gwo bout bwa ak kolòn), yon mekanis vwayaj orizontal, yon mekanis leve, yon platfòm kago, yon fouchèt ak yon sistèm kontwòl elektrik. Detay yo jan sa a:
ankadreman
Ankadreman an se yon ankadreman rektangilè ki konpoze de yon gwo bout bwa anwo, kolòn gòch ak dwa ak yon gwo bout bwa pi ba, ki se sitou itilize pou pote. Yo nan lòd yo fasilite enstalasyon an nan pati ak diminye pwa nan anpileur a, travès yo anwo ak pi ba yo te fè nan asye chanèl, ak kolòn yo te fè nan asye kare. Crossbeam anwo a bay yon bouchon syèl ray ak yon tanpon, ak crossbeam ki pi ba a bay ak yon bouchon tren tè.
Mekanis opere
Mekanis nan kouri se mekanis kondwi nan mouvman an orizontal nan anpileur a, ki se jeneralman konpoze de motè, kouple, fren, redukteur ak wou vwayaje. Li ka divize an kalite kouri tè, kalite kouri anwo ak kalite kouri entèmedyè selon diferan pozisyon nan mekanis kouri. Lè yo adopte kalite kouri tè a, kat wou yo oblije kouri ansanm monorail ki mete sou tè a. Tèt anpileur a gide pa de seri wou orizontal ansanm I-gwo bout bwa ki fikse sou gwo bout bwa anwo a. Se gwo bout bwa anwo a konekte ak boulon ak kolòn, ak gwo bout bwa ki pi ba a soude ak asye chanèl ak plak asye. Mekanis kondwi vwayaj la, wou motè mèt-esklav, kabinè elektrik, elatriye yo tout enstale sou li. De kote yo nan gwo bout bwa ki pi ba yo tou ekipe ak tanpon yo anpeche anpileur a soti nan jenere gwo fòs kolizyon akòz soti nan kontwòl nan tou de bout nan tinèl la. Si anpileur a bezwen pran yon koub, yo ka fè kèk amelyorasyon nan tren gid la.
Mekanis leve
Mekanis nan leve se yon mekanis ki fè platfòm la kago deplase vètikal. Li jeneralman konpoze de motè, fren, redukteur, tanbou oswa wou ak pati fleksib. Pati yo souvan itilize fleksib yo enkli kòd fil asye ak chèn leve. Anplis de redukteur jeneral la, yo itilize redukteur vè k'ap manje kadav la ak redukteur planetè paske nan bezwen an pou yon rapò gwo vitès. Pifò nan aparèy transmisyon chèn leve yo enstale sou pati siperyè a epi souvan ekipe ak kontrepwa pou diminye pouvwa a leve. Yo nan lòd yo fè mekanis nan leve kontra enfòmèl ant, motè a ak fren yo souvan itilize. Se chèn nan fikse konekte ak palèt la nan Kovèti pou la sou kolòn nan. Eleman sipò vètikal leve a se kolòn nan. Kolòn nan se yon estrikti bwat ak prensipal anti deformation, ak tren gid la enstale sou tou de bò kolòn nan. Kolòn nan tou ekipe ak switch pozisyon limit anwo ak pi ba ak lòt konpozan.
Fouchèt
Li se sitou ki konpoze de redukteur motè, piyon, aparèy ki konekte chèn, plak fouchèt, tren gid mobil, tren gid fiks, woulo bi ak kèk aparèy pwezante. Mekanis fouchèt la se mekanis egzekitif pou anpileur a jwenn aksè nan machandiz yo. Li enstale sou palèt anpileur a epi yo ka elaji orizontal epi retire li pou voye oswa pran machandiz yo sou de bò kadriyaj la. Anjeneral, fouchèt yo divize an fouchèt sèl, fouchèt doub oswa fouchèt milti selon kantite fouchèt, ak fouchèt milti yo sitou itilize pou anpile machandiz espesyal. Fouchèt yo se sitou twa etap lineyè diferans teleskopik fouchèt, ki konpoze de fouchèt anwo, fouchèt mitan, fouchèt pi ba ak zegwi a woulo bi ak fonksyon k ap gide, konsa tankou diminye lajè a nan wout la epi fè li gen ase vwayaj teleskopik. Ka fouchèt la ap divize an de kalite dapre estrikti li yo: mòd etajè Kovèti pou ak mòd chèn piyon. Prensip la telescoping nan fouchèt la se ke fouchèt la pi ba enstale sou palèt la, se fouchèt la mitan kondwi pa ba an Kovèti pou oswa ba piyon pou avanse pou pi goch oswa adwat soti nan konsantre nan fouchèt ki pi ba a pa apeprè mwatye nan longè pwòp li yo, ak fouchèt anwo a pwolonje goch oswa adwat soti nan mitan fouchèt la nan yon longè yon ti kras pi long pase mwatye nan longè pwòp li yo. Fouchèt anwo a kondwi pa de chenn roulo oswa kòd fil. Yon bout chèn oswa kòd fil fiks sou fouchèt ki pi ba a oswa palèt la, ak lòt bout la fiks sou fouchèt anwo a.
Mekanis leve ak palèt
Mekanis nan leve sitou konpoze de motè leve (ki gen ladan redukteur), piyon kondwi, chèn kondwi, piyon doub, chèn leve ak piyon idler. Chèn nan leve se yon chenn roulo doub ranje ak yon faktè sekirite ki pi gran pase 5. Li fòme yon estrikti fèmen ak piyon an idler sou palèt la ak travès yo anwo ak pi ba. Lè motè a leve kondwi wou an doub chèn wotasyon nan chèn kondwi a, chèn nan leve ap deplase, kidonk kondwi platfòm la leve (ki gen ladan fouchèt ak machandiz) monte ak tonbe. Se motè a leve kontwole pa konvèsyon frekans PLC pou fè pou evite twòp tansyon sou chèn nan leve nan kòmansman an nan leve ak kanpe. Platfòm nan kago se sitou te fè nan plat atravè ak soude plak asye, ki se sitou itilize enstale fouchèt ak kèk aparèy pwoteksyon sekirite. Yo nan lòd yo asire mouvman ki estab monte ak desann nan palèt la, 4 wou gid ak 2 wou tèt ansanm kolòn nan enstale sou chak bò nan palèt la.
Ekipman elektrik ak kontwòl
Li sitou gen ladan kondwi elektrik, transmisyon siyal ak kontwòl anpileur. Anpileur a adopte liy kontak glisman pou ekipman pou pouvwa; Depi ekipman pou pouvwa glisman liy kontak konpayi asirans kominikasyon an fasil pou entèfere pa dezord pouvwa, se mòd kominikasyon enfrawouj la ak bon anti-entèferans adopte pou fè echanj enfòmasyon ak òdinatè a ak lòt ekipman depo. Karakteristik operasyon yo nan anpileur a se ke li dwe byen pozisyone ak adrese, otreman li pral pran machandiz yo mal, domaje machandiz yo ak etajè, ak domaje anpileur nan tèt li nan ka grav. Kontwòl pozisyon anpileur a adopte metòd rekonesans adrès absoli, epi yo itilize ranje lazè pou detèmine pozisyon aktyèl la nan anpileur a lè yo mezire distans ki soti nan anpileur a nan pwen baz la epi konpare done ki estoke nan PLC a davans. Pri a wo, men fyab la wo.
Aparèy pwoteksyon sekirite
Stacker se yon kalite machin leve, ki bezwen kouri nan gwo vitès nan tinèl segondè ak etwat. Yo nan lòd yo asire sekirite pèsonèl ak ekipman, anpileur a dwe ekipe ak pyès ki nan konpitè konplè ak aparèy pwoteksyon sekirite lojisyèl, epi yo dwe pran yon seri de bloke ak mezi pwoteksyon nan kontwòl elektrik la. Aparèy pwoteksyon sekirite prensipal yo gen ladan pwoteksyon limit tèminal, pwoteksyon verrouillage, kontwòl deteksyon pozisyon pozitif, pwoteksyon kago platfòm kraze, pwoteksyon pouvwa-off, elatriye.

Detèminasyon fòm nan anpileur: gen divès fòm anpileur, ki gen ladan anpileur tinèl monorail, anpileur tinèl doub tren, anpileur tinèl rotary, yon sèl kolòn anpileur, doub kolòn anpileur, elatriye.
Detèminasyon vitès stacker: selon kondisyon koule nan depo a, kalkile vitès orizontal la, vitès leve ak vitès fouchèt anpileur la.
Lòt paramèt ak konfigirasyon: mòd pwezante ak mòd kominikasyon anpileur a chwazi selon kondisyon sit depo a ak kondisyon itilizatè a. Konfigirasyon anpileur a ka wo oswa ba, tou depann de sitiyasyon an espesifik.

Sèvi ak otomatik ki genyen twa dimansyon anpileur depo
* Peye atansyon pou kenbe panèl operasyon an pwòp epi pwòp, epi netwaye pousyè tè a, lwil oliv ak lòt bagay chak jou.
* Depi ekran tactile ak lòt konpozan elektrik nan panèl operasyon an fasil domaje pa imidite, tanpri kenbe yo pwòp.
*Lè w ap netwaye panèl operasyon an, li rekòmande pou w sèvi ak yon twal mouye pou siye, epi peye atansyon pou w pa sèvi ak ajan netwayaj korozivite tankou tach lwil oliv.
*Lè w ap deplase AGV a, ou dwe leve kondwi a an premye. Lè kondwi a echwe pou yo leve pou kèk rezon, pouvwa AGV a dwe etenn. Li entèdi pou deplase AGV a lè kondwi a limen epi kondwi a pa leve.
*Lè AGV a bezwen sispann nan yon ijans, bouton ijans la dwe itilize. Li entèdi pou itilize trennen oswa lòt metòd entèferans pou fòse chariot AGV la sispann.
*Li entèdi pou mete anyen sou panèl operasyon an.
Antretyen chak jou nan otomatik ki genyen twa dimansyon anpileur depo
* Netwaye divès kalite oswa zafè etranje nan anpile a ak wout.
*Tcheke si gen flit lwil oliv nan pozisyon kondwi, anvwaye ak fouchèt la.
*Tcheke pozisyon vètikal kab la.
* Detekte mete tren gid la ak wou gid sou kolòn nan.
* Netwaye je limyè elektwonik / detèktè ki enstale sou anpileur la.
* Tès fonksyon elektwonik optik je / Capteur enstale sou anpileur la.
*Tcheke kondwi a ak operasyon wou (mete).
*Tcheke Pwodwi pou Telefòn yo epi tcheke si wou sipò a domaje.
*Tcheke ke pa gen okenn fant nan pozisyon an soude nan koneksyon an kolòn ak koneksyon boulon.
*Tcheke pozisyon orizontal senti dantèl la.
*Tcheke mobilite anpileur la.
* Vizyèlman enspekte travay penti anpileur la.

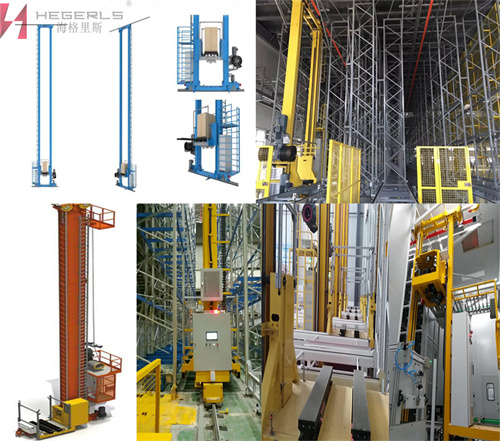
Ak devlopman nan pwodiksyon endistriyèl modèn, nan depo ki genyen twa dimansyon, aplikasyon an nan anpileur pral pi vaste, sitou itilize nan fabrikasyon machin, fabrikasyon otomobil, endistri twal, tren, tabak, medikal ak lòt endistri yo, paske endistri sa yo pral plis apwopriye pou itilize nan depo otomatik pou depo. Hagerls se yon antrepriz konplè ki konsantre sou solisyon, konsepsyon, fabrikasyon ak sèvis enstalasyon nan depo entelijan ak lojistik entèlijan sipòte ekipman automatisation. Li ka bay kliyan yon sèl kolòn anpileur, doub kolòn anpileur, vire anpileur, doub ekstansyon anpileur ak bin anpile ak lòt kalite ekipman. Li ka Customize divès kalite ekipman anpileur selon divès kalite pwodwi, kèlkeswa gwosè ak pwa.
Tan pòs: Out-18-2022