


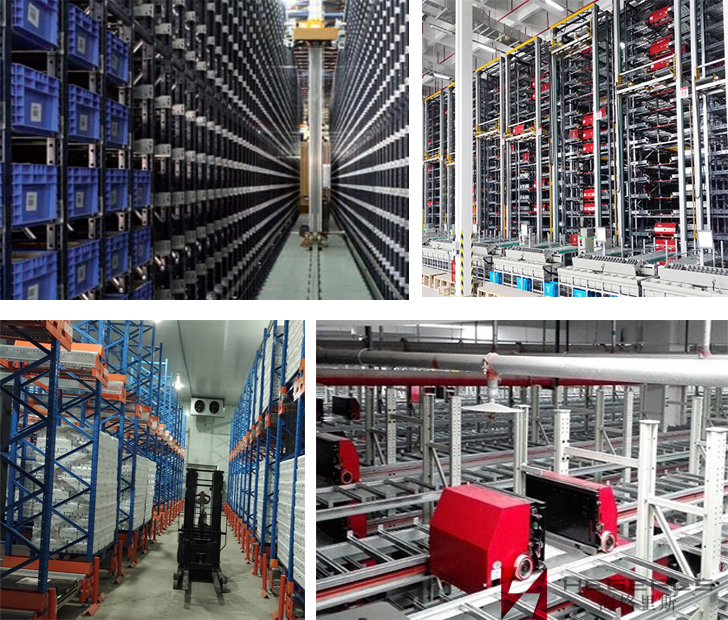
Nan dènye ane yo, ak popilarite kontinyèl nan entènèt la, e-commerce te devlope rapidman. Komodite lòd kliyan yo montre karakteristik anpil varyete, pakèt kèk ak peryòd livrezon kout, sa ki fè dansite depo nan etajè yo nan sant distribisyon lojistik founisè a kontinyèlman amelyore. Frekans materyèl k ap antre epi kite depo a ap ogmante. Nimewo a nan ti pati davwa ap ogmante chak jou. Plis ak plis sant distribisyon lojistik itilize machin navèt ki baze sou machandiz nan sistèm davwa moun.
HEGERLS (Hebei Walker Metal Products Co, Ltd.
Kranje fouchèt telescopic yo lajman ki itilize nan ekipman depo otomatik tankou stereo depo machin navèt milti-kouch, etajè posode AGV, RGV, ak mini chaj. Pwa maksimòm nan bwat materyèl ki te kenbe pa HEGERLS ka rive nan 50Kg. Ka lajè a fixation nan bra fouchèt la dwe ajiste abitrèman nan seri a nan 200 ~ 600mm. Maksimòm vwayaj la se 840mm. Vitès fonksyònman maksimòm fouchèt teleskopik la se 1.5m/s, ak akselerasyon an se 1.2m/s ²。 Bri fonksyònman kontwole nan 75dB, sa ki ka satisfè kondisyon ki nan pifò etajè ekstansyon sèl ak doub. HEGERLS kapab tou Customize milti-kouch navèt machin stereoskopik depo nan bwat la fouchèt teleskopik atiran selon kondisyon espesifik kliyan yo, tankou lajè a grip, davwa konjesyon serebral ak lòt paramèt.
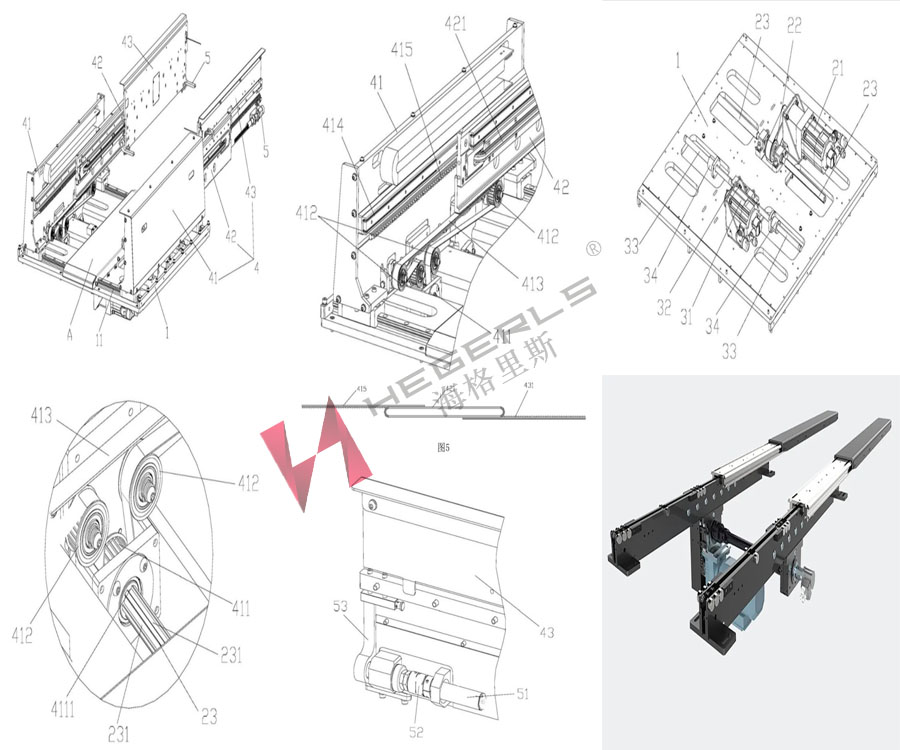
Pati pyès sa yo nan Hiygris HEGERLS grip bwat fouchèt teleskopik milti-kouch navèt machin stereo depo Fouchèt teleskopik la se yon mekanis teleskopik yo itilize nan depo stereo ak sistèm depo lojistik otomatik pou depo materyèl oswa transfè. Li gen fleksib de-fason fonksyon ekspansyon otomatik ak fonksyon limit egzat! Li ka dirèkteman monte sou anpileur a, oswa monte sou yon mekanis leve fiks, oswa monte sou yon platfòm leve mobil. Anpileur a kouri atravè wout ki genyen ant etajè yo otomatikman jwenn aksè oswa transfere atik! Li ka konekte ak sistèm liy pwodiksyon ak sistèm jesyon antrepriz. Li itilize òdinatè ak teknoloji kòd bar (encodeur) pou reyalize enfòmasyon entèlijan jesyon ak operasyon!

Konsènan HEGERLS Clamping Telescopic Fork
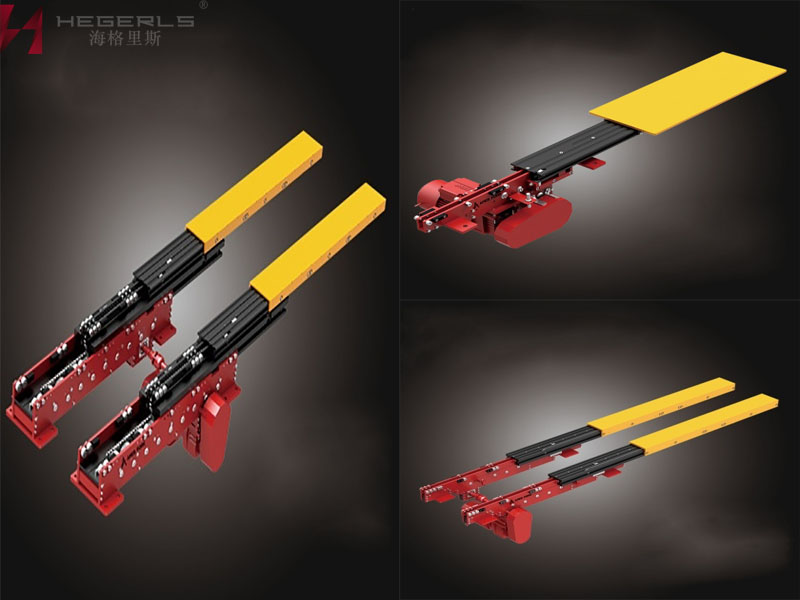
HEGERLS télescopique pinza fouchèt se yon inik kalite fouchèt nan seri de télescopique fouchèt de anpileur, sètadi, yon de-fason otomatik télescopique pinza fouchèt, ke yo rele tou yon kenbe pinza fouchèt oswa yon kenbe pinza fouchèt, yon fouchèt fouchèt oswa yon fouchèt fouchèt. . Li se yon fouchèt ki itilize espesyalman pou transfè ti posode. Li ka dirèkteman reyini sou yon AGV davwa milti-etaj oswa lòt platfòm k ap travay, ak ekspansyon nan bra fouchèt la ak anbreyaj la nan levye a (kwòk), Ranpli aksè a oswa aksyon transfè!
Fouchèt la pinza HEGERLS se sitou te fè nan alyaj aliminyòm, prezante ti gwosè, pwa limyè, vitès kouri vit ak ekspansyon lis. An menm tan an, li tou adopte prensip senkronizasyon milti motè, reyalize ke menm mekanis fouchèt telescopic ka itilize pou transfere oswa jwenn aksè nan bwat diferan espesifikasyon. Li pa sèlman efektivman amelyore efikasite nan depo, men tou, anpil amelyore to itilizasyon espas nan depo, espesyalman pou gwo depo Entelijan entansif!
HEGERLS clip sou estrikti fouchèt teleskopik
Ka estrikti nan fouchèt HEGERLS gripper dwe divize an kote depo gwo twou san fon ak kote depo fon. Yon kote depo gwo twou san fon se yon kote depo ak de bwat materyèl, ak yon kote depo fon se yon kote depo ak yon bwat materyèl. Sa vle di, yon kote depo gwo twou san fon ka kranpon de bwat materyèl nan yon moman, pandan y ap yon kote depo fon ka sèlman kranpon yon bwat materyèl nan yon moman. Diferans ki genyen ant fouchèt la pinza HEGERLS ak òdinè fouchèt duplex télescopique a se ke fouchèt la rale dwèt se toujou konpoze de twa kò fouchèt, sètadi, kò a fouchèt enteryè, kò a fouchèt mitan ak kò a fouchèt deyò, eksepte ke kò a fouchèt devan. gen yon lòt baton rale (kwòk), ki matche ak tren an gid (glise tren), ba roulo, wou synchrone, senti synchrone, ba fluent, baton chanjman (zen), arbr jacking, bar wou, motè kondwi (servo) , chanjman baton motè Enstriman deteksyon an ak lòt konpozan fòme yon mekanis teleskopik konplè, ki kolabore ak bra fouchèt teleskopik la ak anbreyaj levye a (kwòk) pou konplete aksyon an aksè oswa transfè!
Prensip travay HEGERLS clip sou fouchèt teleskopik
Bra fouchèt la nan fouchèt la pinza HEGERLS se bò kanpe ak konekte lateralman pa tren gid. Atravè kontwòl, tren gid la ka glise retounen ak lide pou ajiste distans ki genyen ant de bra fouchèt yo nan fouchèt la, konsa tankou reyalize itilizasyon an komen nan yon fouchèt pou bwat materyèl milti spesifikasyon! Lè w ap ranmase materyèl, fouchèt la pwolonje nan pozisyon depo materyèl la, zen an kenbe (levye) otomatikman bese ak bloke figi fen bwat katon an oswa bwat plastik, ak Lè sa a, fouchèt la retracte, trennen katon an oswa bwat plastik nan mitan an. fouchèt la, ak Lè sa a, deplase soti nan ranvèse selon kondisyon yo degre, zen an (levye) rale tounen, ak fouchèt la retracte ankò pou konplete travay la nan ranmase oswa transfere! Malgre ke prensip la nan fouchèt la grip se menm ak sa yo ki nan fouchèt la teleskopik òdinè, pati yo transmisyon, branch bwa ki konekte ak lòt konpozan nan fouchèt la dwèt yo anpil diferan. Yo itilize li pou dekri ke wou chèn, chèn, Kovèti pou, etajè, elatriye yo tout ranplase pa wou synchrone, senti synchrone, elatriye, pandan y ap glisman bra a sèvi ak ray gid, ak materyèl kò fouchèt yo tout ranplase pa fèy metal. oswa materyèl alyaj aliminyòm, se konsa pwa a nan fouchèt la grip se sèlman sou 80kg.
Anplis de sa, li ta dwe remake ke pandan desen an nan fouchèt la teleskopik kalite gripper, gwosè a nan etajè yo depo dans, pozisyon vètikal nan etajè yo ak bwat, nivo a tras ak gwosè a nan bwat yo ta dwe konbine pou detèmine a. paramèt jeneral nan fouchèt ekstansyon yo (mouvman fouchèt ekstansyon, espas bwat, lajè fouchèt, lajè entèn fouchèt, wotè fouchèt, elatriye), konsa tankou satisfè bezwen yo nan resipyan sou etajè yo. Fouchèt blocage ka sèlman transfere oswa jwenn aksè nan pwodwi yo pake nan katon oswa bwat plastik efektivman, epi yo pa ka transfere materyèl iregilye. Anplis de sa, volim ak pwa nan bwat materyèl transfere pa ta dwe twò gwo, ak pwa chaj la pa ta dwe depase 100KG! Wotè fouchèt la blocage jeneralman fèt dapre wotè bin la!
Konsènan HEGERLS Clip sou Shuttle
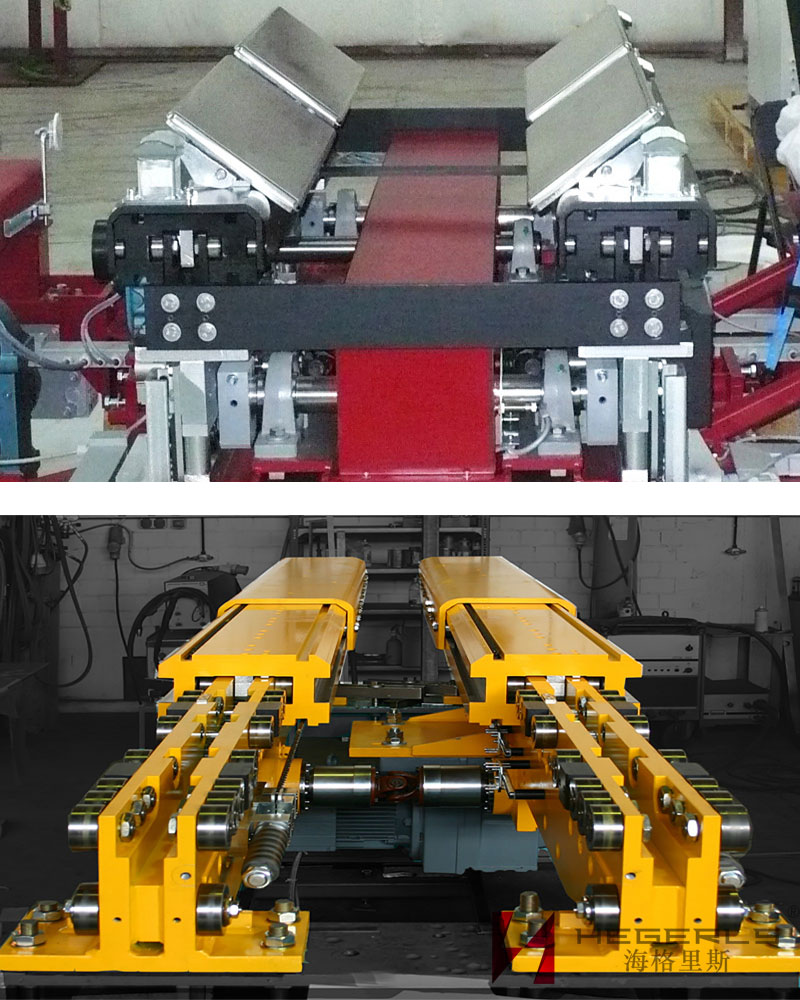
Estrikti nan clip HEGERLS sou navèt konsiste de ankadreman navèt, chasi navèt, mekanis vwayaje, mekanis ekstansyon fouchèt segondè, pèseptè, plak kote yo pote ak platfòm kote yo pote. Estrikti a se jan sa a:
Nenpòt ankadreman navèt se nòmalman yon kavite fèmen ki konpoze de parantèz kò prensipal yo sou tou de bò, koki a ak bracket mwaye enteryè a, epi li respektivman ranje nan tou de bout chasi navèt la; Se koki a bay ak yon kouvèti anwo ki ka louvri epi fèmen atravè yon charnyèr pòt woulman; Yon etajè fil panèl ranje pi wo a bracket mwaye a; Mekanis vwayaj la gen ladann yon wou kondwi, yon wou pasif, yon motè DC brushless, yon redukteur ak yon arbr konekte; Tou de bò nan ankadreman an navèt nan yon bout nan chasi a navèt yo bay ak wou kondwi ki konekte pa konekte arbr, ak tou de bò nan ankadreman an navèt nan lòt bout la nan chasi a navèt yo bay ak wou pasif ki konekte pa konekte arbr; Motè DC brushless kolabore ak redukteur a pou kondwi volan an kondwi ak kondwi volan an pasif; Se arbr a konekte ak yon ankode mayetik, atravè ki pozisyon yo kòmanse ak kanpe nan navèt la sou track dwat la yo jwenn; Yon mekanis ekstansyon fouchèt segondè se simetrik ranje sou bò enteryè nan ankadreman machin navèt la; Chasi navèt ki genyen ant mekanis ekstansyon fouchèt segondè yo bay yon platfòm pote pou mete panyen kago a; Kavite fèmen nan ankadreman machin navèt la respektivman bay yon plak kote yo pote, sou ki yon plak kondwi, yon plak kontwòl prensipal nan mekanis nan vwayaje ak yon plak kontwòl prensipal nan mekanis nan ekstansyon fouchèt yo siksesif ranje; Plak kondwi a kondui mekanis vwayaj la pou kondwi navèt la kouri sou track dwat la. Komisyon Konsèy prensipal la nan mekanis vwayaje kontwole paramèt yo kouri ak kòmanse pozisyon kanpe nan navèt la, ak tablo kontwòl prensipal la nan mekanis ekstansyon fouchèt la kontwole mekanis ekstansyon fouchèt segondè pou pwan epi mete panyen an sou etajè a; Yo mete yon aparèy kolekte ant machin navèt la ak tras dwat la, ki konekte ak fil elektrik la ranje andedan tras dwat la epi yo itilize pou bay pouvwa pou machin navèt la. Karakteristik estriktirèl nan clip la sou machin navèt entelijan pou depo tou manti nan ke genyen siyon yo mete nan pozisyon yo kote volan an kondwi ak volan an pasif respektivman kontakte arbr a konekte, epi yo mete yon bag elastik rete nan Groove pou fòme axial la. pozisyon nan volan an kondwi ak volan an pasif. Wou gid doub yo respektivman mete nan bò a nan chasi a navèt anba volan an kondwi ak volan an pasif, ak ant tras la dwat ak chasi a navèt. Wou gid doub yo fòme limit gòch ak dwa lè volan an kondwi ak wou pasif la ap kouri sou track dwat la. Mekanis segondè ekstansyon fouchèt la gen ladan: plak pouse ekstansyon fouchèt premye nivo, plak ekstansyon fouchèt dezyèm nivo, mekanis pouli synchrone dezyèm nivo, mekanis kondwi ekstansyon fouchèt dezyèm nivo, motè kondwi ekstansyon fouchèt, yon lòt redukteur, ak arbr kondwi a. ; Se bò ekstèn nan bracket mwaye a nan ankadreman machin navèt la bay yon plak pouse ekstansyon fouchèt premye etap; Yon chute ki gen fòm U ranje nan mitan an nan premye etap fouchèt la pouse plak, ak plizyè pouli chute ki gen fòm U yo ranje nan entèval egal nan chute a ki gen fòm U; Yon plak fouchèt segondè ranje deyò chute a ki gen fòm U; Se plak la fouchèt segondè ki konekte ak plizyè pouli Groove ki gen fòm U nan boulon ak nwa; An tèt yo nan dezyèm etap plak ekstansyon fouchèt la yo respektivman bay yon fouchèt chanjman, yon motè DC redukteur planetè ak yon Capteur foto-elektrik soti nan deyò a andedan an; Se Capteur foto-elektrik la itilize pou jwenn siyal pozisyon fouchèt la epi voye li bay tablo kontwòl prensipal la nan mekanis ekstansyon fouchèt la, ki kontwole motè DC planetè redukteur pou kondwi fouchèt la pou avanse pou pi orizontal oswa vètikal; Se yon mekanis segondè synchrone pouli respektivman ranje sou fouchèt prensipal la pouse plak ak dirèkteman anba ak pi wo a chute ki gen fòm U; Mekanis segondè synchrone pouli a konekte ak plak la peze senti synchrone sou plak ekstansyon fouchèt segondè a; Motè kondwi ekstansyon fouchèt la ak yon lòt redukteur kondwi mekanis kondwi ekstansyon fouchèt segondè pou avanse pou pi, epi kondwi mekanis kondwi ekstansyon fouchèt segondè sou lòt bò a pou avanse pou pi nan arbr kondwi a, se konsa ke plak pouse ekstansyon fouchèt prensipal la deplase ak kondwi segondè. mekanis pouli synchrone pou avanse pou pi, konsa kondwi plak ekstansyon fouchèt segondè a pou avanse pou pi. Mekanis transmisyon ekstansyon fouchèt de etap la gen ladan yon ankode mayetik, yon pouli senti synchrone I, yon senti synchrone I, yon aparèy wou tension ak yon etajè; Yon pouli distribisyon 1 ak yon senti distribisyon 1 yo ranje anba plak la pouse fouchèt premye etap la; Yon bò nan pouli a senti synchrone I konekte ak arbr a transmisyon, ak lòt bò a konekte ak arbr a pwodiksyon nan redukteur nan lòt nan keyway la. Aparèy wou tansyonè yo respektivman mete sou tou de bò lòt redukteur a pou fikse oksilyè pouli senti synchrone I ak senti synchrone I; Yon etajè ranje ant plak la pouse fouchèt premye etap ak senti a synchrone; Motè kondwi ekstansyon fouchèt la ak yon lòt redukteur kondwi pouli senti synchrone I ak senti synchrone I pou Thorne, epi kondwi pouli senti synchrone II ak senti synchrone II sou lòt bò a pou vire atravè arbr transmisyon an. An menm tan an, manto yo sou tou de bò kondwi plak ekstansyon fouchèt prensipal korespondan pouse pouse ekstansyon fouchèt prensipal la. Lè mekanis segondè synchrone senti pouli a deplase synchrone ak kondui plak ekstansyon fouchèt segondè a pou avanse pou pi, pouli a ki gen fòm U woule nan chute a ki gen fòm U, Fè plak ekstansyon fouchèt segondè reyalize ekstansyon fouchèt segondè a. Aparèy wou tansyon an gen ladan: boulon, ajisteman bracket, doub nwa ak wou tansyon; Yon wou tansyon ranje anba senti a synchrone I ak sou tou de bò lòt redukteur a, epi li fiks sou bracket kò prensipal la atravè yon nwa doub; Se yon bracket ajisteman ranje anba nwa a doub nan boulon an, epi pozisyon nan bracket ajisteman ajiste pa boulon an, se konsa ke bracket ajiste a kondui nwa a doub pou avanse pou pi monte ak desann, se konsa ke senti a synchrone mwen ka kenbe la. eta tansyon anba aksyon an nan wou a tension.
Ki jan navèt HEGERLS pral mennen nan avantaj antrepriz?
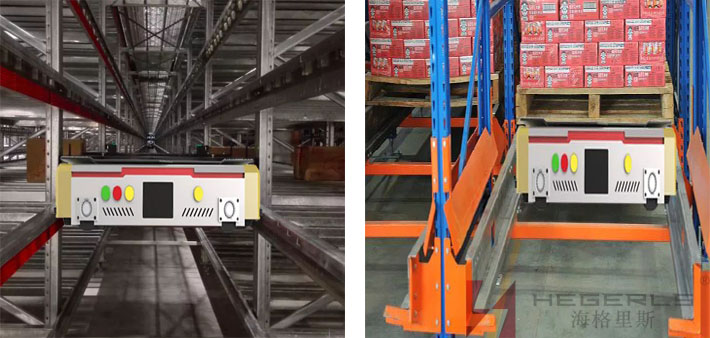
Premyèman, mekanis vwayaj la, mekanis ekstansyon fouchèt ak ankadreman, liy kontak glisman ak aparèy koleksyon pouvwa nan machin navèt entèlijan HEGERLS ak clip sou depo yo rezonab ranje, sa ki fè tout itilizasyon espas machin navèt la, epi li ka adapte yo ak la. otomatik depo ak rekipere machandiz nan espesifikasyon diferan ak kote nan depo ki genyen twa dimansyon, elaji kouvèti aplikasyon an nan machin nan navèt, epi byen vit ak efektivman ranpli yon seri aksyon kontinyèl nan machin nan navèt, tankou mache, ekstansyon fouchèt, davwa. leve epi mete machandiz, Li reyalize depo a rapid ak egzat nan machandiz, kidonk anpil amelyore efikasite operasyon an ak nivo teknoloji automatisation nan depo otomatik, ak diminye depans sa yo envestisman nan antrepriz. An menm tan an, li se senp ak limyè nan estrikti, segondè nan fyab, ak fasil yo kenbe. Li ka ranplase anpileur wout tradisyonèl la, reyalize fleksibilite nan sistèm nan, ak konfòme ak tandans nan devlopman nan e-commerce lojistik ak automatisation depo.
Dezyèmman, nan mekanis vwayaje nan machin navèt entèlijan HEGERLS, arbr yo konekte nan wou kondwi ak wou pasif yo bay ak genyen siyon, ak pati yo konekte nan BEARINGS yo konekte pa yon nouvo kalite bag elastik kenbe, reyalize efè a pwezante axial nan konekte. arbr; Lè w itilize bag elastik la pou reyalize efè pwezante axial, efikasite pwodiksyon an ka ogmante epi pri a ka sove.
Twazyèm: machin navèt entèlijan Higelis HEGERLS pou kenbe depo reyalize ke volan an kondwi ak volan an pasif toujou deplase sou tras la dwat san yo pa devye nan tras la nan estrikti nan wou gid doub. Estrikti pwezante sa a pi estab ak serye.
Katriyèm, estrikti ekstansyon fouchèt segondè adopte pa machin navèt entèlijan HEGERLS ka fè distans ekstansyon fouchèt la pi lwen epi jwenn plis panyen nan diferan pozisyon; An menm tan an, prensip la nan mekanis ekstansyon fouchèt segondè a se senp, ak pri a nan konsepsyon ak fabrike se ba; Pati transmisyon an adopte mòd yon sèl motè + redukteur + arbr transmisyon pou fè mekanis ekstansyon fouchèt segondè a rive nan objektif ekspansyon ak kontraksyon synchrone, ki ekonomize plis depans, efektivman diminye espas ki nesesè yo, epi redwi pwa machin navèt la. .
Senkyèmman, Higelis HEGERLS entèlijan machin navèt la adopte yon nouvo kalite aparèy tansyon wou, ki ka byen vit kenbe senti a synchrone tension ak reyalize travay la nòmal nan machin nan navèt. Anplis, aparèy wou tansyon sa a senp pou fè, pratik pou enstale epi yo ka byen vit ajiste, sa ki sove pri, sove espas ak amelyore efikasite travay.
Tan poste: Dec-19-2022